In the "half step" operation mode, the physical step resolution of a motor is electronically multiplied by 2:
With a 2 phase stepper motor operated in the full step mode, the physical step resolution of the motor is attained. For a 200 step motor that means an obtainable resolution of 200 steps per revolution. The full step position of the rotor is characterized by the fact that both phase 1 and 2 are fully powered. In the full step mode there are only phase sequences with both phases fully powered. A single phase is never powered alone.
With specially designed electronic drivers, the physical, that means the full step resolution, can be enhanced. When the resolution is doubled it is known as half step mode. The 200 step motor can now resolve 400 steps at the motor shaft. Additional to the advantage of a larger number of steps per revolution, this operation mode stimulates smoother motor running and reduced resonance behavior, which is often found in the full step mode. But there is a disadvantage: In the phase sequences there are positions where only one of either phase is powered. As the torque is always proportional to the current, at these rotor positions a lower torque results, compared to a full step position. Without compensating measures this would mean that from step to step, i.e. from half step position to full step position, the resulting torque would be different. Referring to the shaft of the rotating motor, a torque ripple and a reduction of the achievable torque results.
To compensate this torque ripple, a "half step with torque compensation" mode was developed: The current is always enhanced by a factor √2 during the active phase. By this, during each step the same torque is available, as if the motor is operated in the full step mode. Resonance effects are widely reduced.
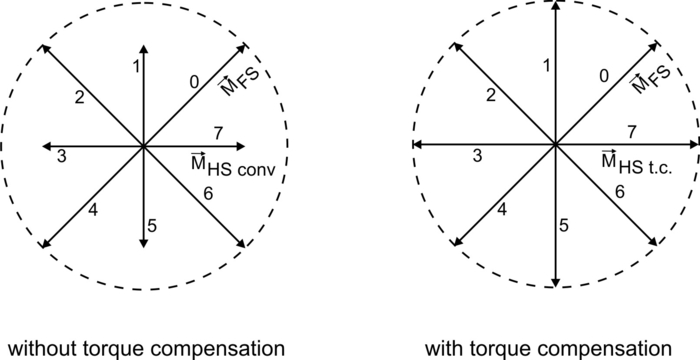
The diagram shows magnitude and direction of the holding torque of an e.g. 4 step motor during one revolution with and without torque compensation. In the full step position two phases are energized, in the half step position one phase is energized. The total torque results from overlapping of both motor phase torques.
Full step torque MFS in comparison with the half step torque MHS is the following: ½MFS½ = ½MHS½ ´ √2