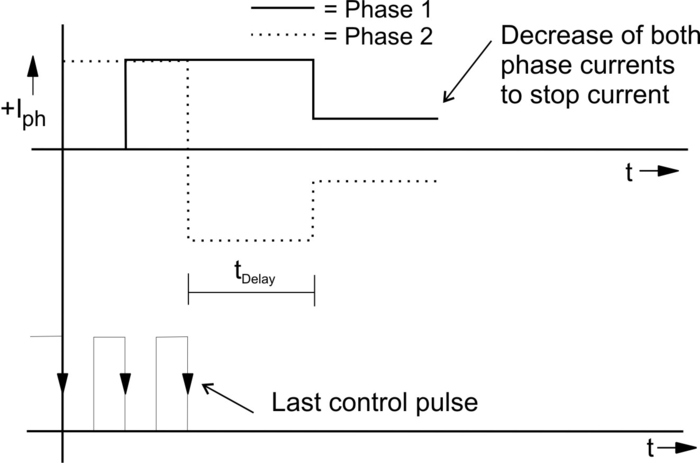
The current delay time is an important feature of the stepper motor power stage technology. Power stages, also called amplifiers, are usually controlled by a pulse and a direction signal. The current delay time is the waiting time between the last arriving control pulse and change over from run current to a reduced stop current.
Automatic changing over to stop current:
After changing to stop current, the ratio of both phase currents in the actual phase pattern remains unchanged. Changing over from run to stop current has to be precisely synchronised in both phases, otherwise an undesired movement of the motor shaft could be generated.
Changing from run current to stop current brings the following advantages:
- Reduced heating of motor and power stage.
- By setting a „current delay time”, the residual oscillations in the final position are damped. More so with higher run currents relative to stop currents. Thus the rotor comes to a standstill in a shorter time and with reduced oscillations.
- Additionally, application of the higher run or boost current for a longer time while stopping the motor ensures that the rotor, owing to its mass inertia, doesn’t rotate beyond the target position. Higher external loads and higher mass inertias might be the reason for mispositioning and step losses when stopping the motor.
In the Phytron ServiceBus mode the current delay time can be set from 1 to 1000msec